About me
Hello World! This is my attempt at a personal blog.
I am currently solving perception challenges at Kodiak Robotics to build and scale autonomous trucks. Most of of my work is on multi-sensor deep learning models to learn unified semantic representations of surroundings. Before Kodiak, I was as a Deep Learning Research Engineer at Deepen AI, an autonomous driving tooling company that focuses on annotation and calibration capabilities powered by AI models and Computational Geometry.
My interests lie in autonomous driving, 3D vision, and perception problems. Additionally, I keep an eye on ML infrastructure work.
Thoughts and Qs from my projects
Point cloud segmentation for improving annotation efficiency
Point cloud semantic segmentation neural network models for improving annotation efficiency 
Tackling Resource Constraints in Federated Learning
Discussion of two papers tackling two different resource constraints in Federated Learning 
Targetless Stereo Camera Calibration
Stereo camera calibration using natural scenes and hence avoiding the use of calibration targets like chessboard, charuco board etc 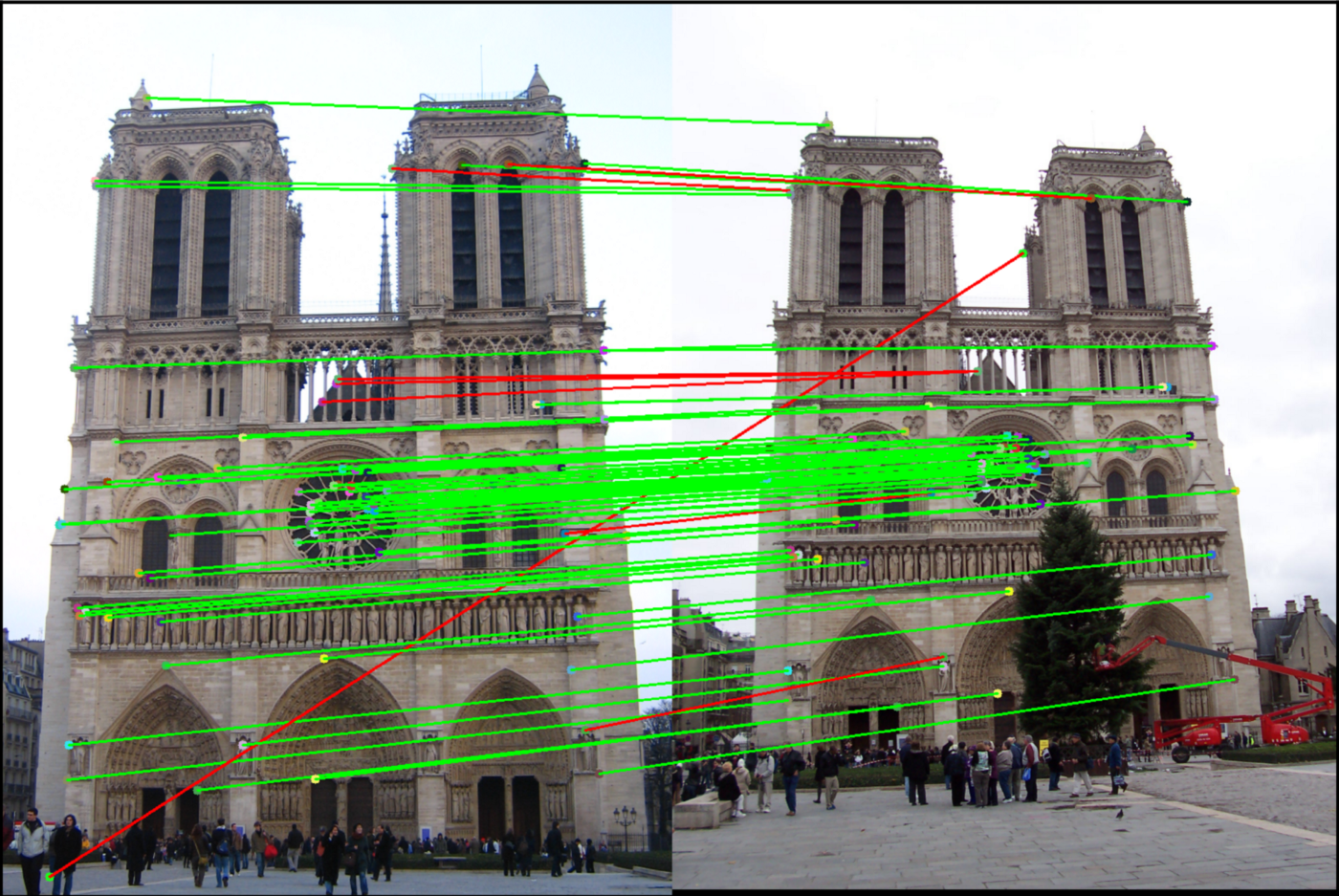
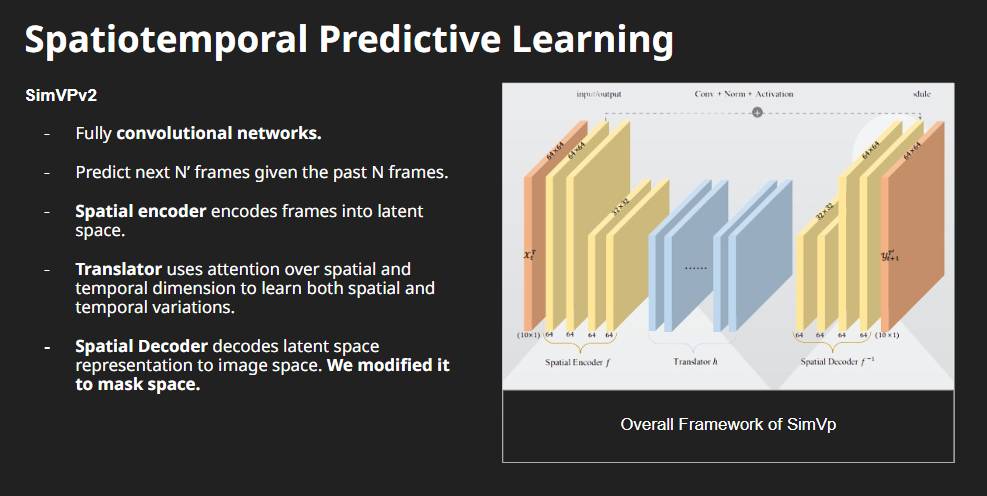
Future Segmentation Prediction Using SimVP and Semi-Supervision
Predicting the segmentation mask of the last frame of a video sequence given the first half of the video using SimVP and semi-supervision